技術(shù)參數(shù)
技術(shù)參數(shù) 產(chǎn)品詳情
產(chǎn)品詳情 相關(guān)產(chǎn)品
相關(guān)產(chǎn)品


華測(cè)如是RS10-SLAM



高精度RTK與SLAM深融合,精度就是高?
華測(cè)20多年高精度RTK設(shè)計(jì),保證復(fù)雜環(huán)境下優(yōu)于3cm精度的RTK定位結(jié)果作為測(cè)圖基準(zhǔn),實(shí)現(xiàn)SLAM全場(chǎng)景5cm絕對(duì)精度

實(shí)時(shí)SLAM解算
內(nèi)嵌CPU 1.2T數(shù)據(jù)算力支撐,13000平方米區(qū)域內(nèi)無(wú)間斷實(shí)時(shí)SLAM解算,實(shí)時(shí)點(diǎn)云瀏覽與即時(shí)量測(cè),內(nèi)業(yè)可直接從主機(jī)拷貝點(diǎn)云成果,無(wú)需二次后處理。
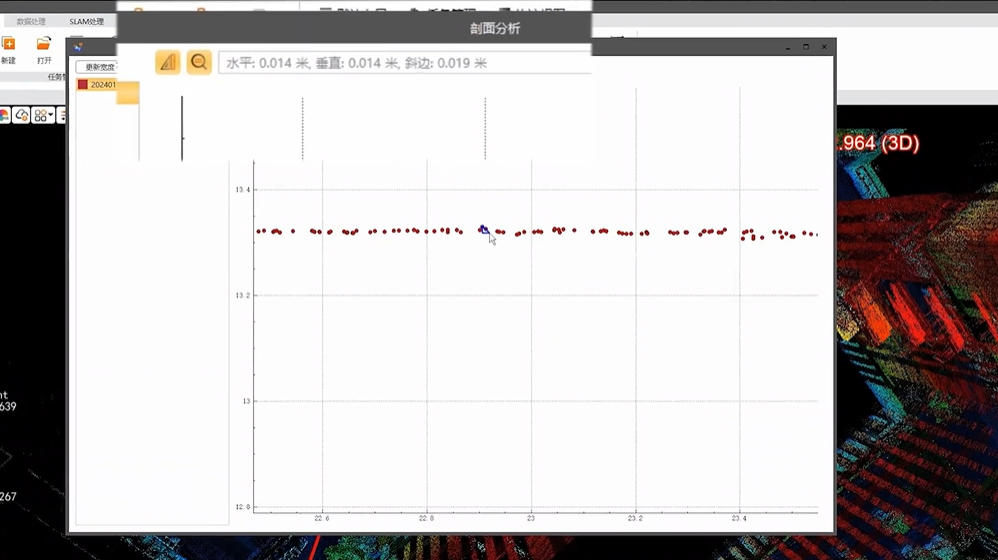
支持后處理精度二次精化
對(duì)于高精度測(cè)量要求使用場(chǎng)景,也支持通過(guò)CoPre軟件對(duì)實(shí)時(shí)點(diǎn)云成果進(jìn)行二次精化處理提升精度,精化后的點(diǎn)云厚度小于2cm,相對(duì)測(cè)量精度小于1cm
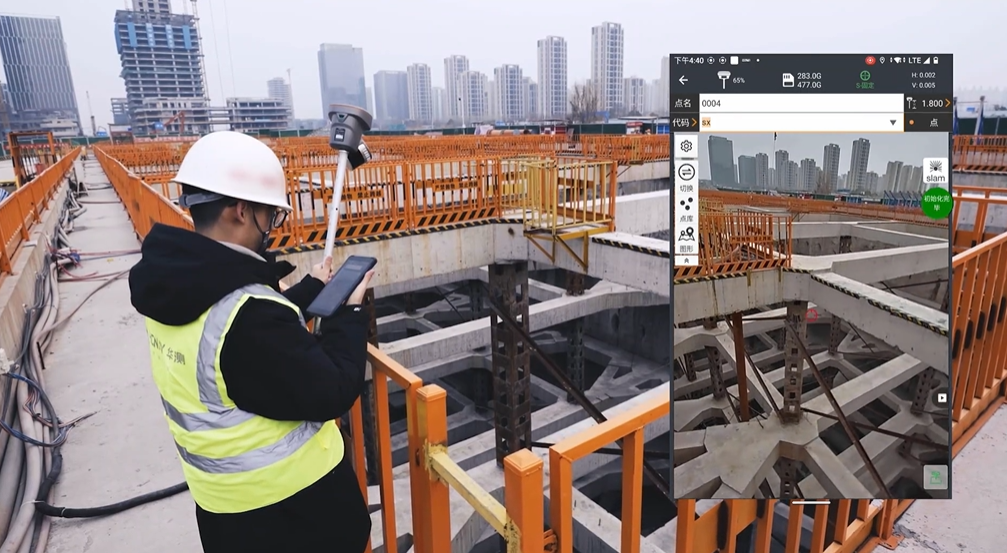
Vi-LiDAR無(wú)接觸測(cè)量新模式,全新體驗(yàn)
如是RS10開(kāi)創(chuàng)RTK產(chǎn)品Vi-LiDAR非接觸測(cè)量新模式,以三目攝像頭捕捉場(chǎng)景圖像,現(xiàn)場(chǎng)拍照并在照片上選擇待測(cè)點(diǎn)后,以RTK為起點(diǎn)的測(cè)量射線與SLAM點(diǎn)云的交點(diǎn),實(shí)時(shí)計(jì)算待測(cè)點(diǎn)三維坐標(biāo),實(shí)現(xiàn)全新無(wú)接觸測(cè)量模式,RTK也可以像全站儀一樣瞄準(zhǔn)測(cè)量,保證15m范圍內(nèi)5cm測(cè)量精度

兼容常規(guī)RTK移動(dòng)站功能
具備常規(guī)移動(dòng)站RTK的所有功能,可使用測(cè)地通APP進(jìn)行作業(yè),無(wú)縫兼容原有測(cè)量業(yè)務(wù),原有華測(cè)RTK用戶(hù)無(wú)需額外學(xué)習(xí),即可輕松上手

川藏聯(lián)網(wǎng)工程某變電站沉降位移觀測(cè)與土方測(cè)量
川藏聯(lián)網(wǎng)工程某變電站沉降位移觀測(cè)與土方測(cè)量,應(yīng)用到了精靈4RTK無(wú)人機(jī)、RTK、全站儀、水準(zhǔn)儀等測(cè)量?jī)x器設(shè)備,項(xiàng)目進(jìn)行現(xiàn)場(chǎng)仿地飛行,保證精度,防撞山,事后動(dòng)態(tài)差分處理,并全線布設(shè)檢查點(diǎn)驗(yàn)證精度。沉降位移點(diǎn)步驟合理,遠(yuǎn)離施工和塌方地段,保證控制點(diǎn)的穩(wěn)定與精度,并設(shè)置相應(yīng)的保護(hù)安全措施。

RTK與無(wú)人機(jī)在阿里札達(dá)某文物3D建模中的應(yīng)用
RTK與無(wú)人機(jī)在阿里札達(dá)某文物3D建模中的應(yīng)用,本項(xiàng)目3D貼近攝影,時(shí)間要求比較緊,現(xiàn)場(chǎng)不允許大飛機(jī)飛行,飛行時(shí)間也得嚴(yán)格申請(qǐng),故采用精靈4RTK貼近攝影,并做PPK事后動(dòng)態(tài)差分處理保證精度。
RTK與無(wú)人機(jī)在雅安天全某水電站庫(kù)容加地形測(cè)量中的應(yīng)用
RTK與無(wú)人機(jī)在雅安天全某水電站庫(kù)容加地形測(cè)量中的應(yīng)用,本項(xiàng)目采用RTK,并大量使用大疆M300RTK+LI進(jìn)行仿地飛行,保證精度,防撞山。特殊地帶采用繞飛或手動(dòng)飛行,事后動(dòng)態(tài)差分處理,并全線布設(shè)檢查點(diǎn)驗(yàn)證精度。

RTK與無(wú)人機(jī)在四川阿壩金川某鋰礦項(xiàng)目地形測(cè)量中的應(yīng)用實(shí)例
RTK與無(wú)人機(jī)在四川阿壩金川某鋰礦項(xiàng)目地形測(cè)量中的應(yīng)用,采用了精靈4無(wú)人機(jī)RTK與RTK,本項(xiàng)目在典型的高山高落差峽谷地帶,采用現(xiàn)場(chǎng)制作仿地文件加分段可視飛行,并做PPK事后動(dòng)態(tài)差分處理,并全線布設(shè)檢查點(diǎn)驗(yàn)證精度。




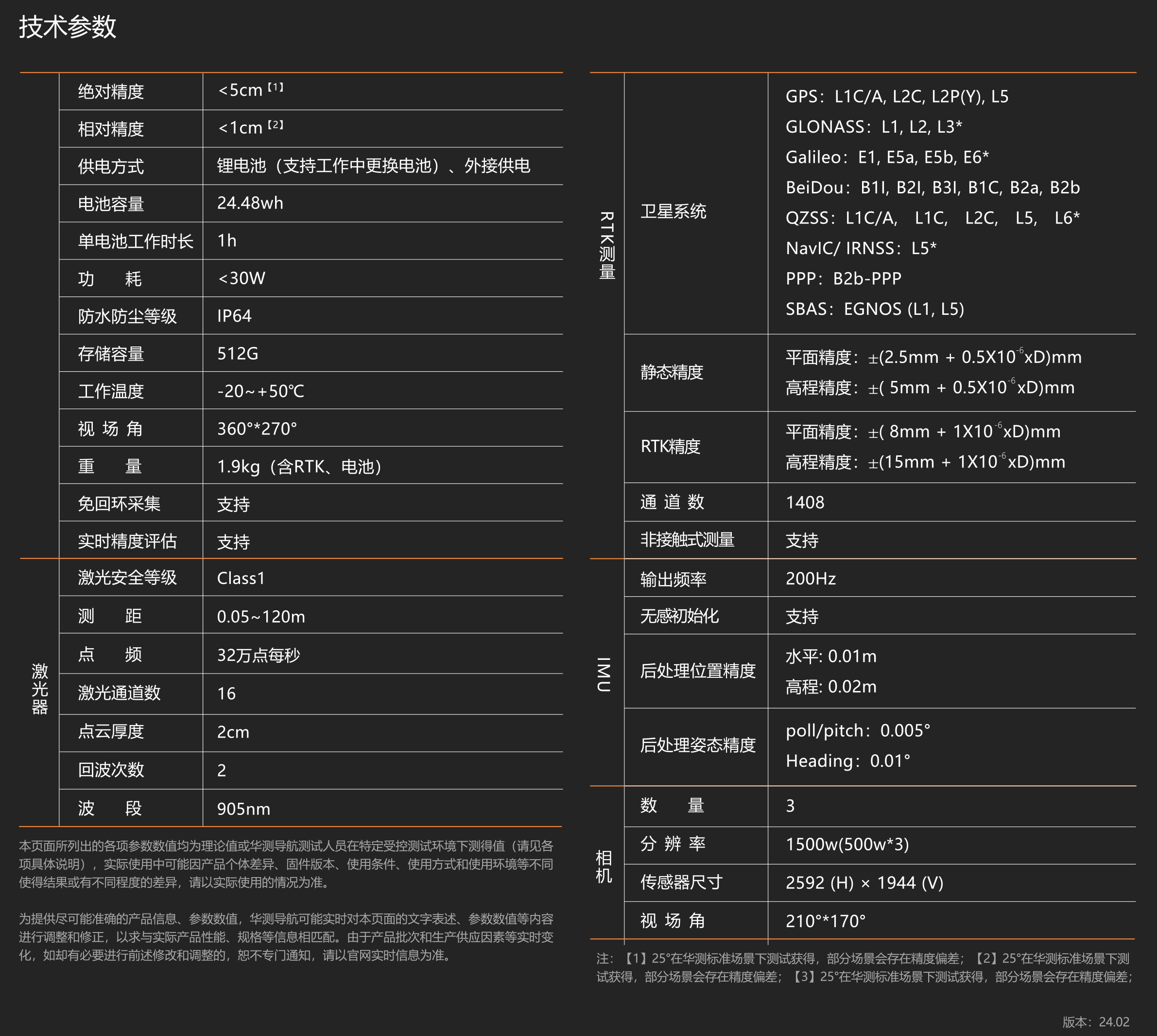
設(shè)備參數(shù)